普通电机、步进电机和伺服电机
普通电机
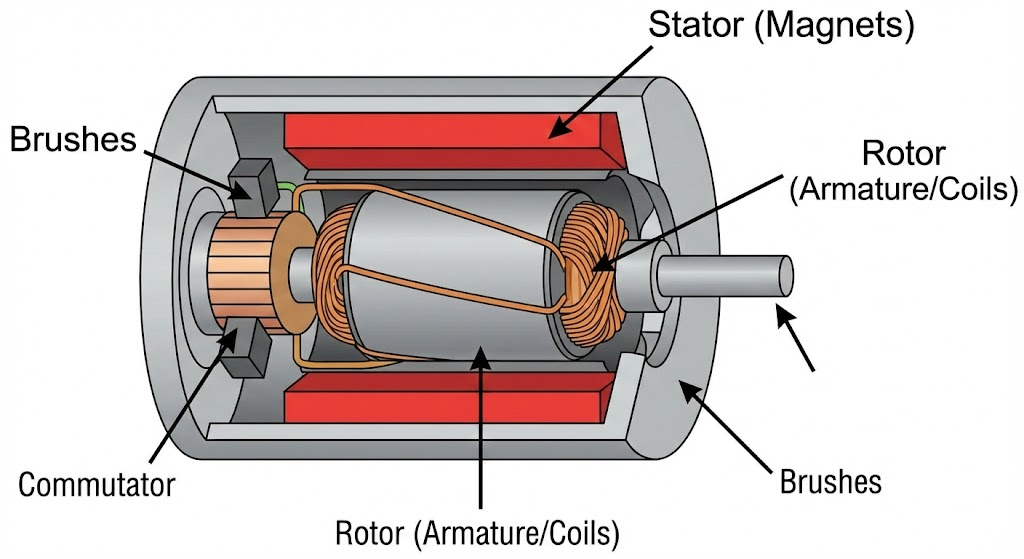
物理结构
外部是一圈磁铁(定子),中间是一个绕满导线的转子。
工作原理
通电后,里面线圈产生磁力,和外面的磁铁“同性相斥,异性相吸”,转子就转动起来。
特点
它只有开和关。给它电,它就转, 电压越高,转的越快。它不知道自己转了多少圈,也无法控制自己精确的停在某个角度。
步进电机
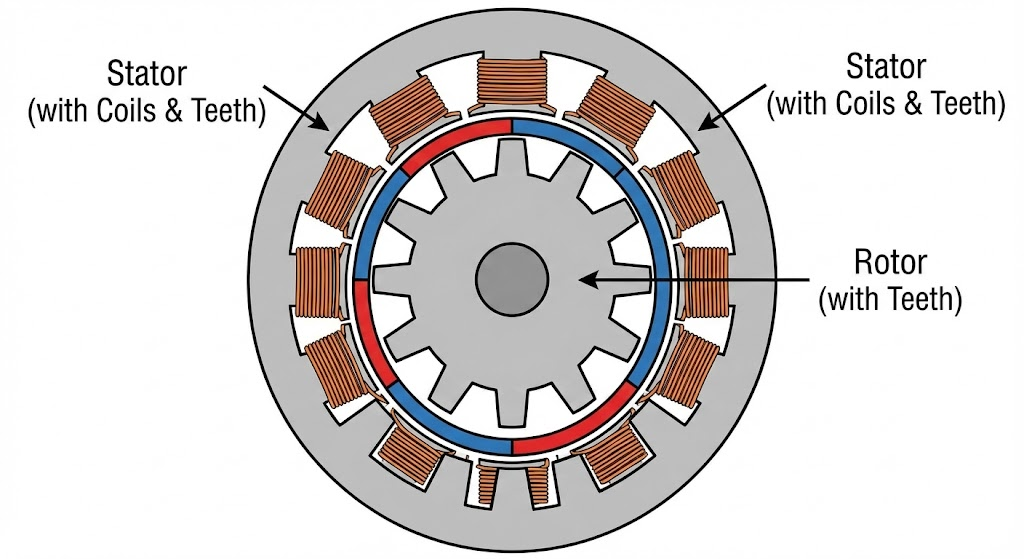
物理结构
可以理解成转子是一个长满了几十个小齿的轮子。外圈的定子也有相应的齿。
工作原理
不是给它持续的电流,而是给它一个一个的脉冲信号。每给一个信号,电机的齿就会对齐到下一格。就像时钟的秒针一样,“嗒”的走一小步。
特点
转的步数精准,你让它走 100 步,它到 100 步就稳稳停下。但在跑太快或负载太重时,它可能会丢步(比如多走了一格或少走了一格)。
伺服电机
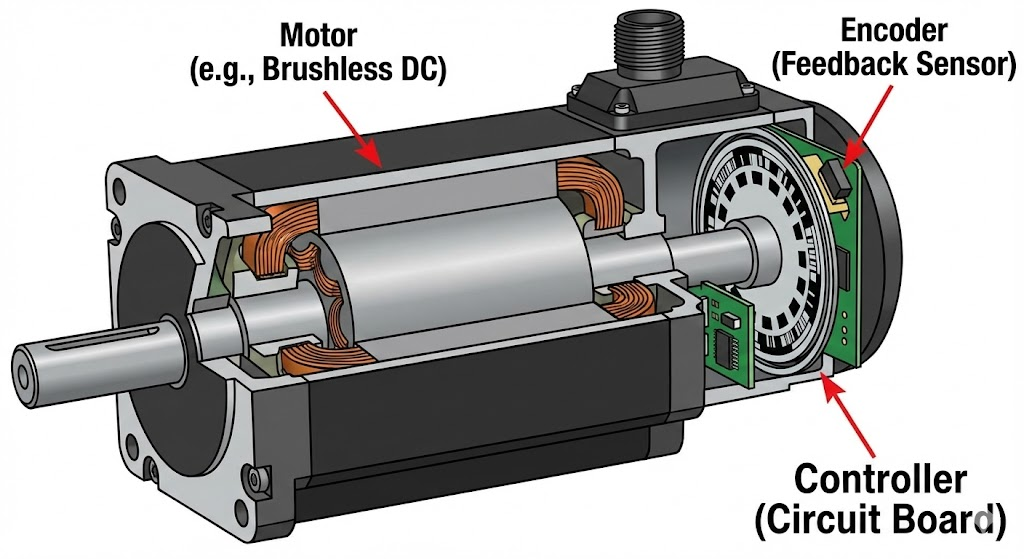
物理结构
伺服电机本质上是一个普通电机+编码器+控制电路的组合体。
普通电机一般是一个性能很好的交流或直流电机。
编码器是安装在电机屁股上的一个精密传感器,负责数电机转了多少度。
控制电路比较复杂,它会高频率的检查电机当前的位置然后调整给它的电流,保证它能在指定的位置精准的停下来。
工作原理
类似与一个不断进行的对话。
第一轮:
控制器:“转到 90 度”,并给一定的电流。
电机:“好的,我开始转了”。
第二轮:
控制器:“编码器,现在电机转了多少度了”。
编码器:“现在转了 60 度了“。
控制器调整电流,让电机继续转。
第三轮:
控制器:”编码器,现在电机转了多少度了“。
编码器:”现在转了 85 度了“。
快到了,控制器调小电流,好让电机精准停在 90 度。
电机根据新的电流继续转动。
三者不停的这样检查,调整,最终让电机精准停在指定的位置。(注意,真实情况不是这样一遍遍询问的,编码器每时每刻都在上报位置,而控制器收到位置立即就会调整电流,这个过程非常快)
Read other posts